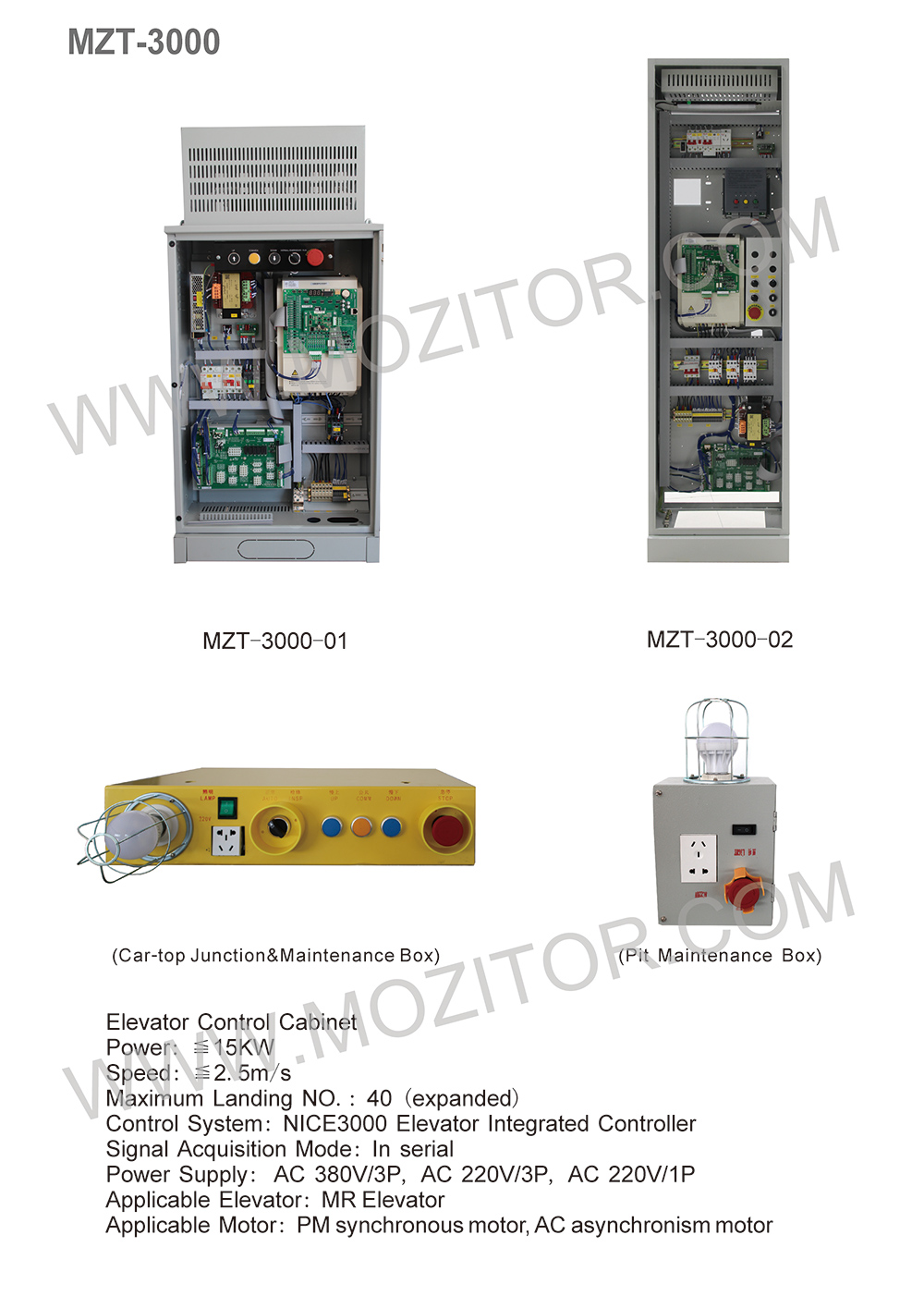
Controlling Cabinet

Elevator Control Cabinet MZT-3000
description
1.Floor Height Data Automatic Correction
Each time the elevator passes through the leveling position, system will auto correct the error position with respect to the shaft parameter self-learn position data base to maintain consistent ride comfort.
2.Elevator Position Auto Calibration
Each time the elevator enters the terminal floor zone, system will self-calibrate the position counter with respect to the 1st slowdown limit switch so that elevator over travel operation will be eliminated.
3.Preset-able Hall Display
Allows user to preset every floor display with additional number (0-9) or character (A-Z) for non-standard display.
4.Cancellation of Unintended Car Call
Passenger needs to press the unintended floor button twice to cancel the false call.
5.Reverse Command Cancellation
When elevator travel to the terminal top or bottom floor, system cancel all the car calls registered for the reverse direction operation.
6.Full Load By-pass
When the elevator load exceeds the full-load set value, (generally >80% load capacity) the elevator will not respond to hall calls when passing floors. However, during this event hall calls can still be registered; they will be serviced on the travel (simplex), or by other elevator service (duplex or group control)
7.Anti-Nuisance Function
System identifies the number of passengers in the car and automatically compares the number of passengers with the number of instructions registered in the car. If an excessive number of calls are registered, then the system considers it is nuisance status and cancels all the car calls/ The passengers need to re-register the desired calls again.
8.Overload Protection
When the elevator is at stationary and the load capacity excesses the rated load capacity, buzzer will sound together with the overload light on. Elevator will halt until overload alarm is trigger off.
9.Duplex Control
It needs only 3 wires to set up without the needs of group controller board.
10.Group Control
Group control with less than 8 elevators is based on fuzzy logic control theory.
11.Independent Mode
Elevator does not respond to any hall calls and closes the door automatically.
12.Reversal Running Protection
Systems continuously monitor the encoder direction via “AB” phase. System will stop immediately when wrong direction is detected, brake will be applied and system will trip on level 5 fault code.
13.Anti-slip Protection
Systems continuously monitor the speed of the elevator via “AB” phase. System will stop immediately when no speed feedback from the cage, brake will applied and system will trip on level 5 fault code.
14.UP/DOWN Over-Speed Protection
The over-speed detector gives an assurance that the speed of car cannot exceed the range of secure speed, thereby guaranteeing the safety of both passengers and cargo.
15.Output Contactor Monitoring
By monitoring the drive output current state, system can determine whether the output contactor circuit is abnormal before release the motor’s brake.
16.Encoder Fault Protection
System uses a high-speed encoder for close-loop vector control. If the encoder fails, the system stops automatically to prevent a runaway failure.
17.Optimum Velocity Profile Generator
The lift controller will optimize the velocity profile based on the desired travel distance and auto-generate velocity profile to achieve direct-to-floor landing.
18.Time-Sharing & Peak Service
Flexible setting of the time-sharing service time period and the corresponding time-sharing service floors.